Active
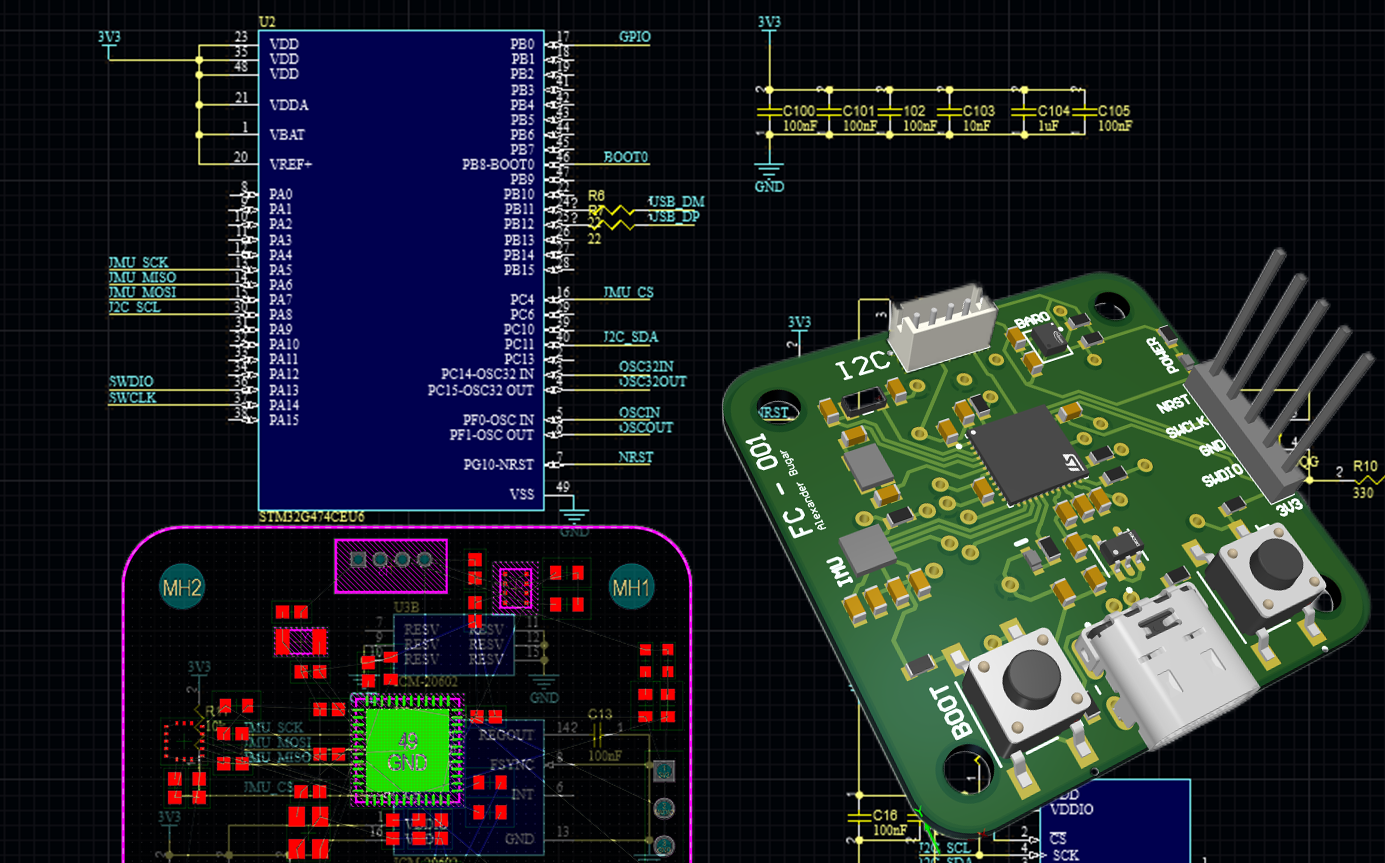
The Flight Controller
Firmware · Sensor Fusion · PCB
STM32G4 flight-controller firmware with FreeRTOS tasks, USB CDC debug output, and a 1 ms IMU loop, split into modular driver, estimator, control, and communication layers.
Build progress